概要
Hinge Constraint(ヒンジ拘束)境界条件は、固定ヒンジの挙動を再現します。割り当てられたサーフェスは、ヒンジ軸周りの回転運動のみが自由となるように拘束されます。割り当てられた円筒面に基づいてヒンジの軸を自動的に検出します。ユーザー定義の入力も可能です。
サポートされる解析タイプ
以下の解析タイプは、円筒ヒンジ境界条件の使用をサポートしています:
ワークベンチでの定義
ヒンジ拘束の設定パネルを示します。
下図のように Axis definition (軸の定義) を Automatic とすると、軸原点と軸方向を自動検出します。
- Assigned Faces (割り当て): 面またはトポロジカルエンティティを選択します。
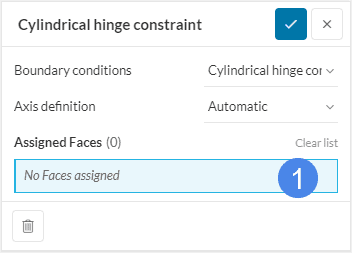
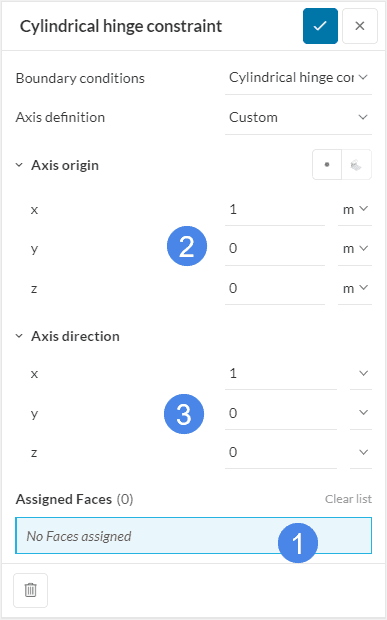
図 2 に、Axis definition (軸の定義): Custom のとしたときの設定項目を示します。
- Assigned Faces (割り当て): 面またはトポロジカルエンティティを選択します。
- Axis origin (軸原点): 軸の参照点を定義します。
- Axis direction (軸方向): 軸方向をベクトルとして定義 し ます。
Axis definition (軸定義)を Automatic で使用する場合は、回転軸を正確に検出するために円筒形状の面のみを選択します。 Axis definition (軸定義)を Custom で定義する場合は、非円筒面も選択できます。
Assigned Faces (面の割り当て)
円筒ヒンジ拘束では、1つの面しか割り当てられないことに注意してください。複数の面を割り当てると、次の警告が表示されます。
“Only one face assignment is allowed. Problematic boundary condition: Cylindrical hinge constraint 1(面の割り当ては1つしかできません。問題のある境界条件です: 円筒ヒンジ制約1)"
選択された面には、変位\( D\) および回転\( R\) の以下の制約が X、Y、Z 方向に適用されます。
\( DX = 0 \)
\( DY = 0\)
\( DZ = 0\)
および
\( RX = about\ X-axis\ only\) または
\( RY = about\ Y-axis\ only\) または
\( RZ = about\ Z-axis\ only\)
大きな回転運動
円筒ヒンジ境界条件は小さな回転運動のみ許可されることに注意してください。
例
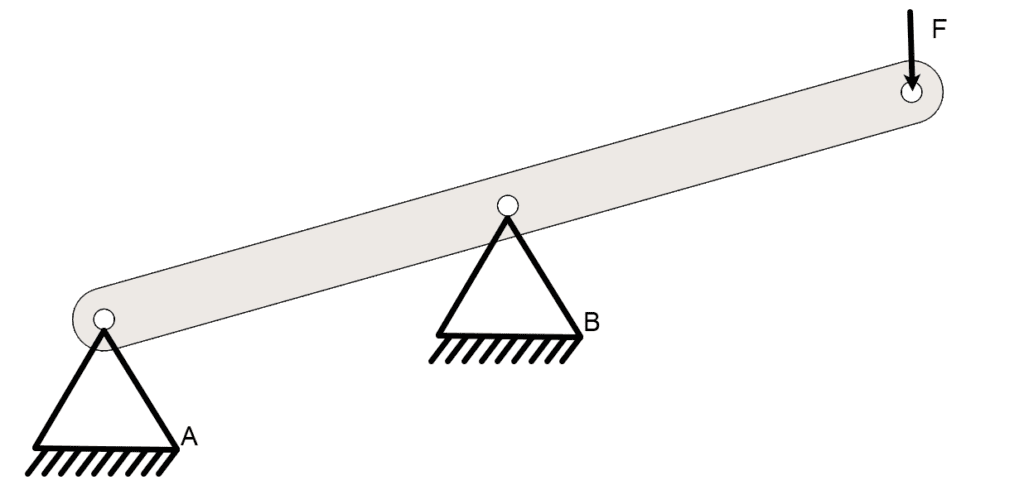
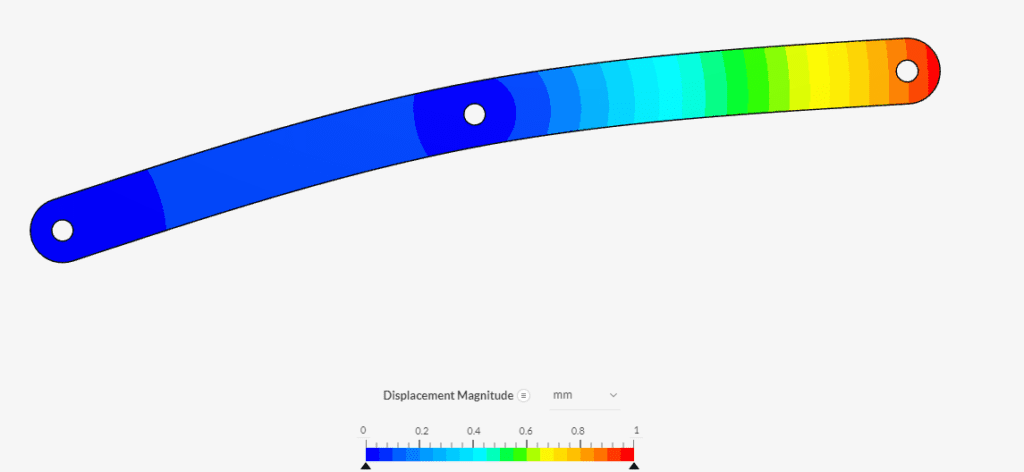
下記は円筒ヒンジ拘束境界条件の使用例です。部品はA点とB点の2つのヒンジで固定され、1\( kN\) の力Fが加えられています。そのため、荷重を加えると変形した部品はこの2つのヒンジ点で回転することができます。
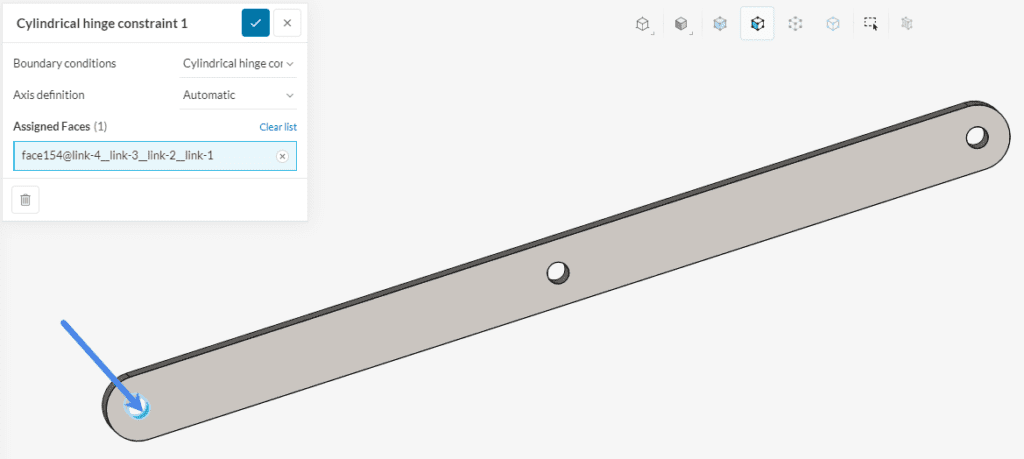
点Aのセットアップを図4に示します。ここでは軸原点と軸方向の自動検出が使用されています。同等の点Bもこのようにセットアップされます。
シミュレーション結果は下図のようになります。予想通り、梁は2つのヒンジ点で回転し、2つのヒンジ点の間にアーチを形成します。
Hinge Constraint(ヒンジ拘束)境界条件の代替方法
円筒ヒンジ拘束境界条件の代わりに、Remote displacement(リモート変位)を使用することができます。
最終更新日2025年1月7日